Divide et Impera
20 Jul 2022
The old Latin phrase of Divide et Impera is often used in Computer Science to simplify complex systems by breaking them down into simpler subsystems. It is therefore time to apply it to the oRatio solver, whose subcomponents are already divided into libraries, but are all kept in the same repository, making them difficult to be used by external components. For this reason I decided to create a new organization, fully dedicated to the solver, which will allow to host the different components within their respective repositories.
The current component organization of oRatio, in particular, is schematized in the following figure. As you can see, the components are varied and, more importantly, many of them can be used for different purposes. It is therefore inconvenient for users to have to download them all in order to use only a few of them.
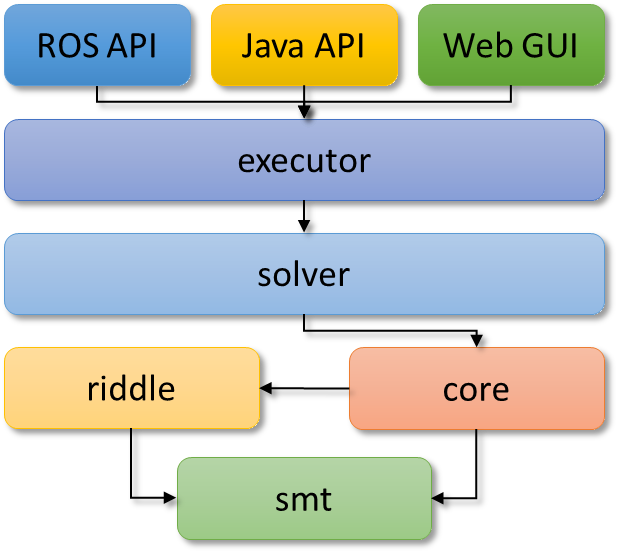
What would happen if you wanted to use the SMT constraint network to solve a different type of problem from those that oRatio is able to solve? What if we wanted to create a new solver capable of solving the same kind of problems without making use of the SMT technology? For these, and for other reasons, assigning each component its own repository would ensure greater agility in implementation. Let’s see in a little more detail what services the different components provide.
SeMiTONE
At the lowest abstraction level, in particular, there is the SeMiTONE (Satisfiability Module TheOries NEtwork) library which, nomen omen, offers, from an SMT perspective, services equivalent to those that a constraint-network offers for a CSP solver.
Based on MiniSat, this library allows the definition and propagation of different types of constraints depending on the implemented theories. At the moment a Linear Real Arithmetic (LRA) theory is implemented, for the management of linear constraints between real variables. In addition, a Difference Logic (DL) theory is also available. This theory, implemented on both reals and integers, is able to impose disjunctive temporal constraints as in a disjunctive temporal network [1]. An Object Variable (OV) theory allows to define (in) equality constraints between object variables. Finally, the MiniSat-based core allows for the imposition of classical propositional constraints.
It is worth noting that, as in any constraint-network, SeMiTONE is unable to solve constraint problems defined on the underlying theories. Problem solving, in particular, is entrusted to an external solver who, being aware of the types of problems that he has to solve, can exploit its own heuristics. SeMiTONE, nonetheless, allows the propagation of the solvers’ choices, assigning to variables values which are consistent with the current choices. In case of inconsistencies, furthermore, SeMiTONE analyzes the conflicting choices, generates a no-good, backtracks to the first useful branch (backjumping) and adds the learnt no-good as a new constraint, thus avoiding that, in a subsequent moment of the search, the same problem occurs in another branch of the search tree.
RiDDLe
The second fundamental component is the RiDDLe (Rational Domain Definition Language) language parser. The RiDDLe language takes inspiration from the DDL.1 language [2]. The current proposal, however, introduces a pure object-oriented approach to the definition of timeline-based domains and problem definitions and, therefore, allows an higher decomposition of the domain model and an increase of modularity with a consequent reduction of the the overall complexity at design phase. Furthermore, thanks to the object-oriented approach, UML modeling features can be naturally exploited to enhance the design phase. In addition, aspects related to first order logic are further made explicit, allowing a uniform representation of planning and scheduling concepts. Finally, although the language is based on a multi-sorted first order logic core, from which the object-oriented approach comes, it has been designed for allowing extensibility and is, hence, agnostic of complex types such as state-variables or resources.
This component, specifically, allows solvers, with a minimum of implementation effort, to parse the RiDDLe language.
The core
The core is a component that allows the management of the objects within the logical environment described by the RiDDLe language. This component provides the high-level functions to handle complex RiDDLe types, methods, constructors, creating new objects, etc. In other words, it provides high-level services for the management of the logical environment, relieving the solvers who use it of the burden of their management.
Should you intend to develop a new solver, this component greatly simplifies the task, allowing to focus solely on the search and heuristics aspects.
The solver
The solver component is the one that actually deals with the concrete resolution of the semantic-causal problem described in the RiDDLe language. This component deals with the creation and management of flaws and resolvers, their relationships, how they define a causal graph and how the topology of this graph can be used to define heuristics that suggest the best flaw to solve. with the best resolver [3].
The executor
Once the semantic-causal problem has been solved, it must be carried out. The executor takes care of managing this task. Through the callback functions, in particular, the user of the executor is notified, in due time, of the various tasks to be performed.
The task of the executor, however, is not limited to a mere dispatching of the different planned tasks to be performed at scheduled time. In fact, the executor is also able to manage any adaptations that, in the meantime, have emerged from the real environment in which the plan is actually carried out. Adaptations, in particular, can concern the delay in starting or ending a task, the failure to execute a task or, even, the addition of new tasks.
ROS API
The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. ROS represents a de-facto standard for robotics. The ROS API provides, through ROS messages and services, the possibility to different ROS nodes to create semantic-causal problems, to solve them, to execute them and, if needed, to adapt them. In other words, it provides a ROS environment with the ability to use the services offered by the executor component.
Java API
What if C++ isn’t your favorite language? The Java API allows, through Java Native Interface (JNI), to interface Java software with the executor. In other words, via the Java API, a Java programmer can, once again, create semantic-causal problems, solve them, execute them and, if needed, adapt them.
This solution is particularly convenient in those situations where there is a need to use oRatio in a web backend environment.
The addition of a similar Python API is expected as soon as possible!
Web GUI
The last described component concerns the Graphical User Interface (GUI) of the solver. At the moment the interface is rather spartan and coarse. However, it is particularly useful for debugging semantic-causal problems. Thanks to the use of WebSocket, in particular, the graphic interface allows to view, during the resolution process, the changes to the current partial plan and to the causal graph introduced dynamically as a consequence of the planner’s choices. Furthermore, the JavaScript components for the visualization of the partial plan and the causal graph can be used to easily embed the generated graphs within web pages.
Conclusions
In the next days the oRatio components will be reorganized into separate libraries that will be usable by users in “classic” mode, compiling and installing them, or, depending on the needs, directly importing them via submodule.
Some of these libraries, such as the SeMiTONE library and the RiDDLe library, are already available. Feel free to use them as you please and send me feedback! The core library will be rolled out shortly. The other components will come accordingly.
References
[1] Tsamardinos, I. & Pollack, M. E. (2003). Efficient solution techniques for disjunctive temporal reasoning problems. Artificial Intelligence. 151 (1–2). 43-89.
[2] & Cesta, A. & Oddi, A. (1996). DDL.1: A Formal Description of a Constraint Representation Language for Physical Domains. New Directions in AI Planning. IOS Press. 341–352.
[3] De Benedictis, R. & Cesta, A. (2020). Lifted Heuristics for Timeline-based Planning. ECAI 2020. IOS Press. 2330-2337 (pdf).
 Hi all! I am Riccardo De Benedictis. I am a researcher in Artificial Intelligence at the
Institute of Cognitive Sciences and Technologies
of the
National Research Council
of Italy. I am a member of the
Planning and Scheduling Technology
(PST) Lab, a research group mainly focused on automated and interactive techniques for planning problems.
Hi all! I am Riccardo De Benedictis. I am a researcher in Artificial Intelligence at the
Institute of Cognitive Sciences and Technologies
of the
National Research Council
of Italy. I am a member of the
Planning and Scheduling Technology
(PST) Lab, a research group mainly focused on automated and interactive techniques for planning problems.
A brief introduction to the RiDDLe language
14 Feb 2023
In programming, a non-procedural language is one that doesn’t require the programmer to outline the specific steps the computer needs to take to solve a task. Instead, these languages put an emphasis on defining the desired result or outcome of the program, rather than the steps to achieve it. By providing higher-level abstractions, non-procedural languages allow the programmer to concentrate on the problem at hand instead of technical details. One example of a non-procedural language is RiDDLe, a dialect of C++ that enables the definition of problems related to semantic, logical, mathematical and causal reasoning. Unlike traditional programming languages, RiDDLe allows for the declaration of variables of various types, with the solver determining the values based on constraints defined using logical operators and relationships. The solver will then find the values that meet the constraints.
Plans are made to be executed!
01 Jan 2023
In the first post of the new year, I would like to discuss some aspects of plan execution that, in my opinion, are too often overlooked by the planning community. In particular, I would like to focus on the execution of plans, and on the need to make plans adaptable and executable. Instead of focusing on the technical details, I would like to discuss some features that any planner, in my opinion, should possess in order to effectively interface with the real world.
What makes Automated Planning complex?
24 Jul 2022
Automated planning is a branch of artificial intelligence that concerns the generation of action sequences, typically for execution by intelligent agents, autonomous robots and unmanned vehicles, which allows the achievement of a set of objectives called goals. Unlike classical control and classification problems, plannins is usually a really complex task. What is that makes this task so complex?
Divide et Impera
20 Jul 2022
The old Latin phrase of Divide et Impera is often used in Computer Science to simplify complex systems by breaking them down into simpler subsystems. It is therefore time to apply it to the oRatio solver, whose subcomponents are already divided into libraries, but are all kept in the same repository, making them difficult to be used by external components. For this reason I decided to create a new organization, fully dedicated to the solver, which will allow to host the different components within their respective repositories.